
Стыковка — Википедия

Стыковка — процесс (или способ) соединения космических аппаратов (КА) с помощью стыковочного механизма (агрегата стыковки), допускающего в дальнейшем рассоединение (расстыковку) КА и продолжение их полётов по отдельности. При этом осуществляется механическое соединение, достаточно прочное для управления полётом одного аппарата с помощью состыкованного с ним другого. Стыковочный механизм может соединять (и не соединять) электрические схемы и гидравлические системы аппаратов; он может также содержать люк для перехода космонавтов из аппарата в аппарат.
Проблема стыковки встала перед создателями космических аппаратов вплотную в частности в связи с программой осуществления пилотируемых облётов Луны и высадок на Луну. Первые технически реализуемые предложения по стыковке относятся к 1962 году.
Одной из ступеней к созданию самой технологии стыковки стал
Стыковка в частности позволяла осуществить полёт пилотируемых экспедиций на Луну — достигалась существенная экономия массы лунного корабля за счёт того, что на Луну садился и с Луны взлетал не весь корабль, а только специальный максимально облегчённый и неспособный к посадке на Землю лунный посадочный модуль корабля. Лунный посадочный и орбитальный модули корабля использовали стыковку в реализованной американской программе «Аполлон» и в неосуществлённой советской программе Л3. Также готовился к полётам вариант корабля «Союз-Контакт» для отработки системы стыковки «Контакт» модулей 7К-ЛОК и ЛК советского комплекса Л3, но в связи с недоведением программы лунного посадочного модуля Л3 до стадии пилотируемых полётов, необходимость полётов «Союза-Контакта» отпала.
Первое в мире сближение двух пилотируемых кораблей было произведено 15 декабря 1965 года кораблями США «Джемини-7» и «Джемини-6A». Максимальное сближение кораблей составило порядка 30 сантиметров.
Первая в мире стыковка в ручном режиме была осуществлена 16 марта 1966 года пилотируемым кораблём США «Джемини-8» с ракетной ступенью «Аджена» запущенной 100 минутами ранее.
В апреле 1967 года должна была состоятся первая в мире стыковка двух пилотируемых кораблей корабля «Союз-2А» с кораблем «Союз-1», но в связи с неполадками в полете «Союз-1» запуск второго корабля был отменен.
Первая в мире полностью автоматическая стыковка двух космических аппаратов произведена 30 октября 1967 года беспилотными вариантами кораблей «Союз» «Космос-186» с «Космос-188».
Первая в мире стыковка двух пилотируемых кораблей была осуществлена 16 января 1969 года кораблем «Союз-4» с «Союз-5». Переход экипажа из одного корабля в другой осуществлялся путем выхода в открытый космос.
Первая в мире стыковка двух пилотируемых кораблей с переходом экипажа через стыковочный узел была осуществлена в марте 1969 года во время полета «Аполлон-10» на лунной орбите.
Первая в мире стыковка двух пилотируемых кораблей при высадке Луну была осуществлена в июле 1969 года во время полета «Аполлон-11».
Первая в мире стыковка пилотируемого корабля с космической станцией и переходом экипажа была осуществлена 7 июня 1971 года кораблем «Союз-11» со станцией «Салют-1».
Первая в мире стыковка двух пилотируемых кораблей разных государств была осуществлена в июле 1975 года кораблем США «Аполлон» с кораблем СССР «Союзом-19» в рамках проекта «Союз — Аполлон».
Стыковки очень широко использовались в лунной программе «Аполлон», для создания и снабжения орбитальных станций, как в СССР/России («Салют-ДОС», «Алмаз-ОПС», «Мир»), так и в США («Скайлэб», полеты к станции «Мир»), Китая («Тяньгун-1», «Тяньгун-2») а в настоящее время — Международной космической станции.
Процессу стыковки предшествует дальнее сближение, затем ближнее, затем с причаливания начинается собственно стыковка. Специальные выступающие элементы стыковочных агрегатов входят в механическое зацепление, после чего начинается стягивание объектов, по окончании которого происходит сцепка замков. В этот момент электро- и гидроразъёмы уже соединены. Далее проверяется герметичность стыка, после чего можно открыть люки и переходить из объекта в объект.
При стыковке объектов большой массы (более массы транспортного корабля класса «Союз» или «Прогресс», близкой к 7 тоннам) стык дополнительно усиливается изнутри съёмными стяжками.
Если получившийся составной объект будет находиться в состыкованном состоянии достаточно долго, то возможен частичный демонтаж стыковочных механизмов и замена их на компактные плоские люки.

Стыковочные агрегаты делятся на два больших класса — активно-пассивные и универсальные.
Активно-пассивные стыковочные агрегаты (чаще всего типа «штырь-конус») различаются по конструкции и устройству на двух стыкующихся космических аппаратах. При этом активный корабль не может состыковаться с другим активным, а пассивный — с другим пассивным.[3][4] Примером является российская Система стыковки и внутреннего перехода.
Универсальные стыковочные агрегаты (обычно андрогинно-периферийные) этого недостатка лишены.
Однако, существующие системы с универсальными стыковочными агрегатами (например, АПАС-75, созданный по программе «Союз — Аполлон», и АПАС-89, предполагавшийся для «Бурана», АПАС-95, использовавшийся на станции «Мир», а также использовавшийся на МКС для челноков Шаттл и модулей) уступают по массогабаритным параметрам и требованиям к точности наведения КА более распространённым штырь-конусным системам.
Впервые активно-пассивные стыковочные агрегаты появились на американских КА «Джемини», и предназначались для стыковки с ракетной ступенью «Аджена» с целью отработки процессов сближения и стыковки в рамках программы подготовки к программе «Аполлон».
Ранние активно-пассивные стыковочные агрегаты, установленные на кораблях «Джемини» и кораблях «Союз» с номерами 1, 2 (беспилотный корабль), 3, 4, 5, 7, 8, не имели люка для внутреннего перехода, и космонавтам приходилось выходить в открытый космос в скафандрах. Такая же схема была предусмотрена и в лунном орбитальном 7К-ЛОК и лунном посадочном ЛК модулях корабля-комплекса Л3 советской лунной экспедиции ради экономии массы стыковочного агрегата.
В американской лунной программе «Аполлон» лунные орбитальный и посадочный корабельные модули использовали усовершенствованный стыковочный узел с внутренним переходом.
В СССР стыковочные агрегаты начали разрабатываться по программе 7К-9К-11К, целью которой был пилотируемый облёт Луны без использования тяжёлой ракеты-носителя. Несмотря на то, что программа была отменена, космический корабль «Союз», выросший из проекта 7К, был оснащён активно-пассивным стыковочным агрегатом и системой поиска, сближения и стыковки «Игла», позволившей осуществить первую автоматическую стыковку беспилотных аппаратов. Далее стыковочные агрегаты гражданских («Салют-ДОС», «Мир») и военных («Алмаз-ОПС») орбитальных станций и пилотируемых («Союз») и грузовых («Прогресс» и ТКС) кораблей и модулей к ним были унифицированными и использовали внутренний переход.
Китай освоил технологию андрогинно-периферийный стыковки (автоматической и ручной) для реализации программы национальных космических станций «Тяньгун», посещаемых кораблями «Шэньчжоу» с 2012 года. [5]
 Стыковочный узел «Прогресса-М»
Стыковочный узел «Прогресса-М»- Андрогинно-периферийный агрегат стыковки: АПАС-75, АПАС-89, АПАС-95. На российских модулях МКС используют систему «штырь-конус» — стыковочные агрегаты системы стыковки и внутреннего перехода (ССВП) для стыковки кораблей «Союз» и «Прогресс» и гибридные стыковочные агрегаты ССВП-М для стыковки модулей, причем ССВП-М имеет стыковочный шпангоут такой же, как у АПАС-95.
- В октябре 2010 года согласован Международный стандарт стыковочной системы (англ. International Docking System Standard,
- Система стыковки НАСА разработана по этому стандарту, другое её название это Стыковочная система слабого столкновения (англ. Low Impact Docking System, сокр. LIDS), разработанная НАСА, которую предполагалось использовать в проекте «Созвездие». Несмотря на то, что эта система является уменьшенной, облегчённой и упрощённой версией АПАС, они несовместимы. Для сопряжения узлов системы АПАС-95 с Системой стыковки НАСА разработан Международный стыковочный адаптер (англ. International Docking Adapter, сокр. IDA).
- Также для стыковки на МКС используется Единый механизм пристыковки англ. Common Berthing Mechanism или (CBM) — эта система используется на H-II Transfer Vehicle, Dragon SpaceX, Cygnus.
Значение слова СТЫКОВКА. Что такое СТЫКОВКА?
Стыковка — процесс (или способ) соединения космических аппаратов (КА) с помощью стыковочного механизма (агрегата стыковки), допускающего в дальнейшем рассоединение (расстыковку) КА и продолжение их полётов по-отдельности. При этом осуществляется механическое соединение, достаточно прочное для управления полётом одного аппарата с помощью состыкованного с ним другого. Соединение электрических схем и гидравлических систем аппаратов при стыковке может происходить, а может и не происходить.Проблема стыковки встала перед создателями космических аппаратов вплотную в связи с программой осуществления пилотируемых облётов Луны и высадок на Луну. Первые технически реализуемые предложения по стыковке относятся к 1962 году.
Стыковка позволила осуществить полёт пилотируемых экспедиций на Луну — была достигнута экономия массы за счёт того, что на Луну садился и с Луны взлетал не весь экспедиционный комплекс, а только специальный лунный корабль-модуль комплекса, максимально облегчённый и неспособный к посадке на Землю. Лунно-орбитальный и лунно-посадочный корабли-модули комплекса использовали стыковку и в реализованной американской программе «Аполлон» и в неосуществлённой советской программе Л3. Также готовился к полётам вариант корабля «Союз-Контакт» для отработки системы стыковки «Контакт» кораблей-модулей 7К-ЛОК и ЛК советского комплекса Л3, но в связи с недоведением лунно-посадочной программы Л3 до стадии пилотируемых полётов, необходимость полётов «Союза-Контакта» отпала.
Первый групповой полет пилотируемых кораблей состоялся 11 августа 1962 года. С космодрома Байконур было запущены корабль «Восток-3» с космонавтом Андрияном Григорьевичем Николаевым (позывной «Сокол») и корабль «Восток-4» с Павлом Романовичем Поповичем (позывной «Беркут») был выведен на орбиту спустя сутки.
Первая в мире стыковка в ручном режиме была осуществлена с ракетной ступенью «Аджена» пилотируемым кораблём США «Джемини-8» с экипажем в составе Нил Армстронг и Дэвид Скотт 16 марта 1966 года.
Первая в мире полностью автоматическая стыковка двух космических аппаратов (беспилотных кораблей «Союз» под названиями «Космос-186» и «Космос-188») произведена 30 октября 1967 года в СССР.
Первая в мире стыковка двух пилотируемых кораблей должна была быть осуществлена в СССР в апреле 1967 года (корабли «Союз-1» и «Союз-2А»), но в связи с аварийным полётом первого корабля (с гибелью космонавта) состоялась позже — в январе 1969 года (корабли «Союз-4» и «Союз-5»).
Далее стыковки очень широко использовались в лунной программе «Аполлон» и для создания и снабжения орбитальных станций, как в СССР/России («Салют-ДОС», «Алмаз-ОПС», «Мир»), так и в США («Скайлэб»), а в настоящее время — Международной космической станции и станций Китая.
стыковка — Викисловарь
Содержание
- 1 Русский
- 1.1 Морфологические и синтаксические свойства
- 1.2 Произношение
- 1.3 Семантические свойства
- 1.3.1 Значение
- 1.3.2 Синонимы
- 1.3.3 Антонимы
- 1.3.4 Гиперонимы
- 1.3.5 Гипонимы
- 1.4 Родственные слова
- 1.5 Этимология
- 1.6 Фразеологизмы и устойчивые сочетания
- 1.7 Перевод
- 1.8 Библиография
| В Викиданных есть лексема стыковка (L167312). |
Морфологические и синтаксические свойства[править]
| падеж | ед. ч. | мн. ч. |
|---|---|---|
| Им. | стыко́вка | стыко́вки |
| Р. | стыко́вки | стыко́вок |
| Д. | стыко́вке | стыко́вкам |
| В. | стыко́вку | стыко́вки |
| Тв. | стыко́вкой стыко́вкою | стыко́вками |
| Пр. | стыко́вке | стыко́вках |
сты-ко́в-ка
Существительное, неодушевлённое, женский род, 1-е склонение (тип склонения 3*a по классификации А. А. Зализняка).
Приставка: с-; корень: -тык-; суффиксы: -ов-к; окончание: -а [Тихонов, 1996].
Произношение[править]
- МФА: [stɨˈkofkə]
Семантические свойства[править]
Значение[править]
- соединение объектов для их совместного действия или взаимодействия ◆ Отсутствует пример употребления (см. рекомендации).
Синонимы[править]
Антонимы[править]
Гиперонимы[править]
Гипонимы[править]
Родственные слова[править]
| Ближайшее родство | |
Этимология[править]
Происходит от ??
Фразеологизмы и устойчивые сочетания[править]
Перевод[править]
| Список переводов | |
| |
Библиография[править]
- Новые слова и значения. Словарь-справочник по материалам прессы и литературы 60-х годов / Под редакцией Н. З. Котеловой и Ю. С. Сорокина. — М. : Советская энциклопедия, 1971.
 | Для улучшения этой статьи желательно:
|
Стыковка и швартовка космического корабля — Википедия
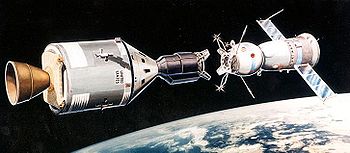
 Свободно летящий корабль Прогресс перед стыковкой с МКС
Свободно летящий корабль Прогресс перед стыковкой с МКС  Корабль SpaceX Dragon перед швартовкой, но уже захваченный механической рукой Канадарм2
Корабль SpaceX Dragon перед швартовкой, но уже захваченный механической рукой Канадарм2Стыковка и швартовка космического корабля (англ. Docking and berthing of spacecraft) — это соединение двух космических аппаратов. Это соединение может быть временным или полупостоянным, например, для модулей космической станции. В английском языке — понятия «стыковка космических аппаратов» и «швартовка космических аппаратов» подразумевают различные методы соединения космических аппаратов. В русском языке в обоих случаях применяется только термин «стыковка космических аппаратов».
Под стыковкой понимается соединение двух отдельных свободно летающих космических аппаратов. [1][2][3]
Под швартовкой (англ. berthing) понимаются операции сближения, когда неактивный модуль / транспортное средство захватывается, подтягивается и затем устанавливается в стыковочный узел другого космического аппарата, с помощью роботизированной руки. Поскольку в обратном процессе — операции отшвартовки (в английском языке) космического корабля, также задействуется механическая рука, управляемая с МКС, а это трудоёмкая и долгая операция, способ отшвартовки не подходит для быстрой эвакуации экипажа, в случае чрезвычайной ситуации[4].
Соединение (сцепка) двух объектов в космосе может быть «мягким» или «жёстким». Как правило, космический корабль сначала выполняет мягкую сцепку, устанавливая контакт и фиксируя свой стыковочный разъём в разъёме целевого транспортного средства. После установления мягкого соединения и проверки давления внутри обоих кораблей, начинается переход на жёсткую сцепку, где стыковочные механизмы стягивают стыковочные узлы кораблей, образуя герметичное уплотнение. После выравнивания давления внутри кораблей, экипаж внутренние люки для перемещения экипажа и груза.
Стыковка[править | править код]
 Первая стыковка была произведена между космическим кораблём Джемини-8 и неуправляемым КА Agena 16 марта 1966 года.
Первая стыковка была произведена между космическим кораблём Джемини-8 и неуправляемым КА Agena 16 марта 1966 года.Способность стыковки космического корабля зависит от способности двух космических аппаратов находить друг друга и удерживать станцию на одной орбите . Впервые это было разработано Соединенными Штатами для проекта Джемини. Было запланировано, чтобы экипаж Джемини 6 встретился и вручную состыковался под командованием Уолтера Ширры с неуправляемой целевой машиной Agena в октябре 1965 года, но во время запуска машина Agena взорвалась. На пересмотренном задании «Джемини 6А» Ширра успешно выполнил рандеву в декабре 1965 года с экипажем « Джемини 7», приблизившись на расстояние 1 фута, но между двумя космическими кораблями «Близнецы» не было возможности стыковки. Первая стыковка с Agena была успешно выполнена под командованием Нила Армстронга на Джемини 8 16 марта 1966 года. Ручные стыковки были выполнены в трех последующих миссиях Джемини в 1966 году.
Программа Аполлон предусматривала стыковку и расстыковку на орбите Луны, чтобы высадить людей на Луну и вернуть их обратно. Для этого, после того, как оба корабля были отправлены с орбиты Земли к Луне, сначала пришлось выполнить операции отстыковки посадочного Лунного модуля (LM) от материнского космического корабля Apollo Command / Service Module (CSM). Затем, после завершения посадки подуля на Луну, двум астронавтам в ЛМ пришлось снова взлететь с Луны и состыковаться с CSM на лунной орбите, чтобы затем вернуться на Землю. Космические корабли были спроектированы так, чтобы обеспечить возможность перемещения экипажа внутри транспортного средства через переход между носом командного модуля и крышей лунного модуля. Эти маневры были впервые продемонстрированы на низкой околоземной орбите 7 марта 1969 года на Аполлоне 9, затем на лунной орбите в мае 1969 года на Аполлоне 10, затем в шести других миссиях посадки на Луну.
В отличие от Соединенных Штатов, которые использовали пилотируемую стыковку с ручным управлением в программах «Аполлон», «Скайлэб» и «Спейс шаттл», Советский Союз использовал автоматизированные стыковочные системы с самого начала своих попыток стыковки. Первая такая система, «Игла», была успешно испытана 30 октября 1967 года, когда на орбите автоматически состыковались две испытательные машины «Союз» «Космос-186» и «Космос-188»[5][6] Это были первые успешные стыковки. После чего началась отработка процесса стыковки пилотируемых кораблей. Испытания проводились 25 октября 1968 года с кораблем «Союз-3» на неуправляемом корабле «Союз-2»; попытка стыковки была неудачной. 16 января 1969 года между кораблями «Союз-4» и « Союз-5» была удачной. Эта ранняя версия космического корабля «Союз» не имела внутреннего туннеля перехода, но два космонавта выполнили выход в открытый космос и перешли по внешней обшивке из корабля «Союз-5» на корабль «Союз-4».
В 1970-х годах Советский Союз модернизировал космический корабль «Союз», добавив в него внутренний транспортный переход, который был задействан для перехода космонавтов во время программы космической станции «Салют», причем первое успешное посещение космической станции состоялось 7 июня 1971 года, когда » Союз-11″ был пристыкован к «Салюту-1» . Соединенные Штаты повторили эту операцию, также пристыковав свой космический корабль «Аполлон» к космической станции «Скайлэб» в мае 1973 года. В июле 1975 года две страны сотрудничали в испытательном проекте «Союз-Аполлон», стыкуя космический корабль «Аполлон» с кораблем «Союз». При этом использовался специально разработанный шлюзовой стыковочный модуль, для плавного перехода из насыщенной кислородом атмосферы корабля Аполлон в корабль Союз, в котором состав атмосферы был приближен к земному.
Начиная с «Салюта-6» в 1978 году, Советский Союз начал использовать беспилотный грузовой космический корабль «Прогресс» для пополнения своих космических станций на низкой околоземной орбите, значительно увеличивая продолжительность пребывания экипажа. Как беспилотный космический корабль, «Прогресс» полностью автоматически стыковался с космическими станциями. В 1986 году стыковочная система «Игла» была заменена обновленной системой «Курс» на космическом корабле «Союз». Несколько лет спустя, космический корабль «Прогресс» получил такую же модернизацию[5]. Система «Курс» до сих пор (данные 2019 года) использовалась для стыковки с российским орбитальным сегментом МКС.
Швартовка[править | править код]
Структура поддержки полета в отсеке полезной нагрузки Колумбии под отметкой 180 градусов на плоскости -V3 космического телескопа Хаббла во время полета STS-109 .(термин „швартовка“ применяется в англоязычных статьях, в русском переводе применяется термин „стыковка“)
Швартовка в космосе это захват, подтягивание и установка в стыковочный узел или в грузовой отсек, каких-либо объектов[7]. Этими объектами могут быть космические аппараты или грузы, которые можно захватить для технического обслуживания / возврата, с помощью системы дистанционного манипулятора[8][9].
Андрогиность[править | править код]
Стыковочные узлы / устройства подтягивания могут быть как неандрогинными (типа «штырь-гнездо»), так и андрогинными (симметричными). От этого зависит, смогут ли быть соединены или нет пара стыковочных модулей.
Ранние системы соединения космических кораблей были проектами неандрогинных стыковочных систем. Неандрогинные конструкции — это вариант, так называемого «гендерного соединения»[2], где каждый присоединяемый космический корабль имеет уникальный дизайн («мужской» или «женский») и играет определенную роль (пассивную или активную) в процессе стыковки. Эти роли нельзя поменять местами. В этой паре, два космических корабля одного «пола» не могут быть состыкованы.
Андрогинный стыковочный узел (также, как и андрогинная швартовка), напротив, имеет одинаковый интерфейс на обоих космических кораблях или устройствах швартовки. В андрогинном интерфейсе используется единый дизайн, благодаря которому, стыковочный узел может соединяться с точно таким же стыковочным узлом. Это позволяет менять роли (активную на пассивную), а также обеспечивает возможность спасения и совместную работу любой пары космических аппаратов[2].
Список механизмов / систем[править | править код]
Адаптеры (переходники)[править | править код]
Стыковочный адаптер или адаптер устройства захвата — это механическое или электромеханическое устройство, которое облегчает подключение стыковочных узлов (СУ) или устройств захвата (УЗ), оснащённых интерфейсами разных типов. Хотя такие интерфейсы теоретически могут быть парами СУ-СУ, СУ-УЗ или УЗ-УЗ, только первые два типа были развернуты в космосе до настоящего времени. Ранее выпущенные и планируемые к запуску адаптеры перечислены ниже:
-

Модуль стыковки ASTP
-
Герметизирующий переходник (PMA)
-
Международный стыковочный адаптер (IDA)



Стыковка с беспилотным космическим аппаратом[править | править код]
Механизм мягкого захвата (SCM), добавленный в 2009 году к космическому телескопу Хаббла. SCM позволяет космическим кораблям с экипажем и без экипажа, использующим систему стыковки NASA (NDS), стыковаться с Хабблом.

Стыковка на поверхности Марса[править | править код]
НАСА рассматривала способы стыковки марсохода Crewed Mars с жилым модулем на Марсе или с модулем возвращения[18]
- ↑ John Cook. ISS Interface Mechanisms and their Heritage (неопр.). Houstan, Texas: Boeing (1 Jan 2011). — «Docking is when one incoming spacecraft rendezvous with another spacecraft and flies a controlled collision trajectory in such a manner so as to align and mesh the interface mechanisms. The spacecraft docking mechanisms typically enter what is called soft capture, followed by a load attenuation phase, and then the hard docked position which establishes an air-tight structural connection between spacecraft. Berthing, by contrast, is when an incoming spacecraft is grappled by a robotic arm and its interface mechanism is placed in close proximity of the stationary interface mechanism. Then typically there is a capture process, coarse alignment and fine alignment and then structural attachment.». Дата обращения 31 марта 2015.
- ↑ 1 2 3 International Docking Standardization (неопр.). NASA (17 марта 2009). — «Docking: The joining or coming together of two separate free flying space vehicles». Дата обращения 4 марта 2011.
- ↑ Advanced Docking/Berthing System – NASA Seal Workshop (неопр.). NASA (4 ноября 2004). — «Berthing refers to mating operations where an inactive module/vehicle is placed into the mating interface using a Remote Manipulator System-RMS. Docking refers to mating operations where an active vehicle flies into the mating interface under its own power.». Дата обращения 4 марта 2011. Архивировано 22 сентября 2011 года.
- ↑ http://www.nasaspaceflight.com/2015/02/astronauts-spacewalk-re-wire-iss-commercial-crew/
- ↑ 1 2 Mir Hardware Heritage Part 1: Soyuz (неопр.). NASA. Дата обращения 3 октября 2018. Архивировано 26 декабря 2017 года.
- ↑ History (неопр.). Дата обращения 23 июня 2010. Архивировано 24 апреля 2008 года.
- ↑ NSTS 21492 (Basic) «Space Shuttle Program Payload Bay Payload User’s Guide» (2000), Lyndon B. Johnson Space Center, Houston Texas
- ↑ Японский космический корабль пришвартовался к МКС (рус.). Interfax.ru. Дата обращения 23 сентября 2019.
- ↑ Dragon пристыковался к МКС (неопр.). ТАСС. Дата обращения 23 сентября 2019.
- ↑ Kristall module (77KST) at a glance (неопр.).
- ↑ Space Shuttle Mission STS-74 Press Kit (неопр.). NASA. — «Atlantis will carry the Russian-built Docking Module, which has multi-mission androgynous docking mechanisms at top and bottom». Дата обращения 28 декабря 2011.
- ↑ Apollo ASTP Docking Module (неопр.). Astronautix. Дата обращения 7 апреля 2018.
- ↑ Hartman. International Space Station Program Status (неопр.). NASA (23 July 2012). Дата обращения 10 августа 2012.
- ↑ Lupo. NDS Configuration and RequirementsChanges since Nov 2010 (неопр.). NASA (14 июня 2010). Дата обращения 22 августа 2011. Архивировано 14 августа 2011 года.
- ↑ Hartman. Status of the ISS USOS (неопр.). NASA Advisory Council HEOMD Committee (July 2014). Дата обращения 26 октября 2014.
- ↑ Pietrobon. United States Commercial ELV Launch Manifest (неопр.) (August 20, 2018). Дата обращения 21 августа 2018.
- ↑ Bayt. Commercial Crew Program: Key Drving Requirements Walkthrough (неопр.). NASA (26 июля 2011). Дата обращения 27 июля 2011. Архивировано 28 марта 2012 года.
- ↑ [1]
Стыковка — Википедия. Что такое Стыковка
Стыковка — процесс (или способ) соединения космических аппаратов (КА) с помощью стыковочного механизма (агрегата стыковки), допускающего в дальнейшем рассоединение (расстыковку) КА и продолжение их полётов по отдельности. При этом осуществляется механическое соединение, достаточно прочное для управления полётом одного аппарата с помощью состыкованного с ним другого. Стыковочный механизм может соединять (и не соединять) электрические схемы и гидравлические системы аппаратов; он может также содержать люк для перехода космонавтов из аппарата в аппарат.
Создание технологии
Проблема стыковки встала перед создателями космических аппаратов вплотную в частности в связи с программой осуществления пилотируемых облётов Луны и высадок на Луну. Первые технически реализуемые предложения по стыковке относятся к 1962 году.
Ступенью к созданию самой технологии стыковки также стал первый групповой полет пилотируемых кораблей состоялся 11 августа 1962 года. С космодрома Байконур были запущены корабль «Восток-3» с космонавтом Андрияном Григорьевичем Николаевым (позывной «Сокол») и корабль «Восток-4» с Павлом Романовичем Поповичем (позывной «Беркут») был выведен на орбиту спустя сутки[1].
Стыковка в частности позволяла осуществить полёт пилотируемых экспедиций на Луну — достигалась существенная экономия массы лунного корабля за счёт того, что на Луну садился и с Луны взлетал не весь корабль, а только специальный максимально облегчённый и неспособный к посадке на Землю лунный посадочный модуль корабля. Лунный посадочный и орбитальный модули корабля использовали стыковку в реализованной американской программе «Аполлон» и в неосуществлённой советской программе Л3. Также готовился к полётам вариант корабля «Союз-Контакт» для отработки системы стыковки «Контакт» модулей 7К-ЛОК и ЛК советского комплекса Л3, но в связи с недоведением программы лунного посадочного модуля Л3 до стадии пилотируемых полётов, необходимость полётов «Союза-Контакта» отпала.
Первая в мире стыковка в ручном режиме была осуществлена 16 марта 1966 года с ракетной ступени «Аджена» пилотируемым кораблём США «Джемини-8» (экипажем: Нил Армстронга и Дэвид Скотт).
Первая в мире полностью автоматическая стыковка двух космических аппаратов (беспилотных вариантов кораблей «Союз» под наименованиями «Космос-186» и «Космос-188») произведена 30 октября 1967 года в СССР.
Первая в мире стыковка двух пилотируемых кораблей должна была быть осуществлена в СССР в апреле 1967 года (корабли «Союз-1» и «Союз-2А»), но в связи с аварийным полётом первого корабля (с гибелью космонавта) состоялась позже — в январе 1969 года (корабли-участники программы «Союз-4» и «Союз-5»).
Далее стыковки очень широко использовались в лунной программе «Аполлон» и для создания и снабжения орбитальных станций, как в СССР/России («Салют-ДОС», «Алмаз-ОПС», «Мир»), так и в США («Скайлэб»), а в настоящее время — Международной космической станции и станций Китая.
Процесс
Процессу стыковки предшествует дальнее сближение, затем ближнее, затем с причаливания начинается собственно стыковка. Специальные выступающие элементы стыковочных агрегатов входят в механическое зацепление, после чего начинается стягивание объектов, по окончании которого происходит сцепка замков. В этот момент электро- и гидроразъёмы уже соединены. Далее проверяется герметичность стыка, после чего можно открыть люки и переходить из объекта в объект.
При стыковке объектов большой массы (более массы транспортного корабля класса «Союз» или «Прогресс», близкой к 7 тоннам) стык дополнительно усиливается изнутри съёмными стяжками.
Если получившийся составной объект будет находиться в состыкованном состоянии достаточно долго, то возможен частичный демонтаж стыковочных механизмов и замена их на компактные плоские люки.
Стыковочный агрегат
Стыковка КА Союз и Аполлон с универсальными (андрогинными) стыковочными модулями (рисунок)Стыковочные агрегаты делятся на два больших класса — активно-пассивные и универсальные.
Активно-пассивные стыковочные агрегаты (чаще всего типа «штырь-конус») различаются по конструкции и устройству на двух стыкующихся космических аппаратах. При этом активный корабль не может состыковаться с другим активным, а пассивный — с другим пассивным.[2][3] Примером является российская Система стыковки и внутреннего перехода.
Универсальные стыковочные агрегаты (обычно андрогинно-периферийные) этого недостатка лишены.
Однако, существующие системы с универсальными стыковочными агрегатами (например, АПАС-75, созданный по программе «Союз — Аполлон», и АПАС-89, предполагавшийся для «Бурана», АПАС-95, использовавшийся на станции «Мир», а также использовавшийся на МКС для челноков Шаттл и модулей) уступают по массогабаритным параметрам и требованиям к точности наведения КА более распространённым штырь-конусным системам.
Впервые активно-пассивные стыковочные агрегаты появились на американских КА «Джемини», и предназначались для стыковки с ракетной ступенью «Аджена» с целью отработки процессов сближения и стыковки в рамках программы подготовки к программе «Аполлон».
Ранние активно-пассивные стыковочные агрегаты, установленные на кораблях «Джемини» и кораблях «Союз» с номерами 1, 2 (беспилотный корабль), 3, 4, 5, 7, 8, не имели люка для внутреннего перехода, и космонавтам приходилось выходить в открытый космос в скафандрах. Такая же схема была предусмотрена и в лунном орбитальном 7К-ЛОК и лунном посадочном ЛК модулях корабля-комплекса Л3 советской лунной экспедиции ради экономии массы стыковочного агрегата.
В американской лунной программе «Аполлон» лунные орбитальный и посадочный корабельные модули использовали усовершенствованный стыковочный узел с внутренним переходом.
В СССР стыковочные агрегаты начали разрабатываться по программе 7К-9К-11К, целью которой был пилотируемый облёт Луны без использования тяжёлой ракеты-носителя. Несмотря на то, что программа была отменена, космический корабль «Союз», выросший из проекта 7К, был оснащён активно-пассивным стыковочным агрегатом и системой поиска, сближения и стыковки «Игла», позволившей осуществить первую автоматическую стыковку беспилотных аппаратов. Далее стыковочные агрегаты гражданских («Салют-ДОС», «Мир») и военных («Алмаз-ОПС») орбитальных станций и пилотируемых («Союз») и грузовых («Прогресс» и ТКС) кораблей и модулей к ним были унифицированными и использовали внутренний переход.
Китай освоил технологию андрогинно-периферийный стыковки (автоматической и ручной) для реализации программы национальных космических станций «Тяньгун», посещаемых кораблями «Шэньчжоу» с 2012 года.[4]
Список стыковочных систем
Стыковочный узел «Прогресса-М»- Андрогинно-периферийный агрегат стыковки: АПАС-75, АПАС-89, АПАС-95. На российских модулях МКС используют систему «штырь-конус» — стыковочные агрегаты системы стыковки и внутреннего перехода (ССВП) для стыковки кораблей «Союз» и «Прогресс» и гибридные стыковочные агрегаты ССВП-М для стыковки модулей, причем ССВП-М имеет стыковочный шпангоут такой же, как у АПАС-95.
- В октябре 2010 года согласован Международный стандарт стыковочной системы (англ. International Docking System Standard, сокр. IDSS)[5][6], в котором используются основные элементы АПАС-95 и LIDS, но они несовместимы.
- Система стыковки НАСА разработана по этому стандарту, другое её название это Стыковочная система слабого столкновения (англ. Low Impact Docking System, сокр. LIDS), разработанная НАСА, которую предполагалось использовать в проекте «Созвездие». Несмотря на то, что эта система является уменьшенной, облегчённой и упрощённой версией АПАС, они несовместимы. Для сопряжения узлов системы АПАС-95 с Системой стыковки НАСА разработан Международный стыковочный адаптер (англ. International Docking Adapter, сокр. IDA).
- Также для стыковки на МКС используется Единый механизм пристыковки англ. Common Berthing Mechanism или (CBM) — эта система используется на H-II Transfer Vehicle, Dragon SpaceX, Cygnus.
См. также
Примечания
Ссылки
Стыковка — это… Что такое Стыковка?
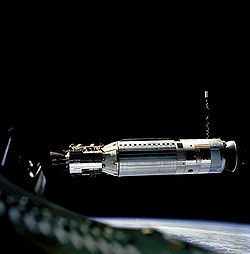 Сближение Джемини-8 с Аджена (фотография с Джемини, последняя ступень Аджена в центре кадра)
Сближение Джемини-8 с Аджена (фотография с Джемини, последняя ступень Аджена в центре кадра)Стыковка — процесс (или способ) соединения космических аппаратов (КА) с помощью стыковочного механизма (агрегата стыковки), допускающего позднее рассоединение (расстыковку) КА и продолжение их полётов по отдельности. При этом осуществляется механическое соединение, достаточно прочное для управления полётом одного аппарата с помощью состыкованного с ним другого. Соединение электрических схем и гидравлических систем аппаратов при стыковке может происходить, а может и не происходить.
Проблема стыковки встала перед создателями космических аппаратов вплотную в связи с программой осуществления пилотируемых облётов Луны и высадок на Луну. Первые технически реализуемые предложения по стыковке относятся к 1962 году.
Стыковка позволила осуществить полёт пилотируемых экспедиций на Луну — была достигнута экономия массы за счёт того, что на Луну садился и с Луны взлетал не весь экспедиционный комплекс, а только специальный лунный корабль-модуль комплекса, максимально облегчённый и не способный к посадке на Землю. Лунно-орбитальный и лунно-посадочный корабли-модули комплекса использовали стыковку и в реализованной американской программе «Аполлон» и в неосуществлённой советской программе Л3. Также готовился к полётам вариант корабля «Союз-Контакт» для отработки системы стыковки «Контакт» кораблей-модулей 7К-ЛОК и ЛК советского комплекса Л3, но в связи с недоведением лунно-посадочной программы Л3 до стадии пилотируемых полётов, необходимость полётов «Союза-Контакта» отпала.
Первая в мире стыковка в ручном режиме была осуществлена с ракетной ступенью «Аджена» пилотируемым кораблём США «Джемини-8» с экипажем в составе Нил Армстронг и Дэвид Скотт 16 марта 1966 года.
Первая в мире полностью автоматическая стыковка двух космических аппаратов (беспилотных кораблей «Союз» под названиями «Космос-186» и «Космос-188») произведена 30 октября 1967 года в СССР.
Первая в мире стыковка двух пилотируемых кораблей должна была быть осуществлена в СССР в апреле 1967 года (корабли «Союз-1» и «Союз-2А»), но в связи с аварийным полётом первого корабля (с гибелью космонавта) состоялась позже — в январе 1969 года (корабли «Союз-4» и «Союз-5»).
Далее стыковки очень широко использовались в лунной программе «Аполлон» и для создания и снабжения орбитальных станций, как в СССР/России («Салют-ДОС», «Алмаз-ОПС», «Мир»), так и в США («Скайлэб»), а в настоящее время — Международной космической станции и станций Китая.
Процесс
Процессу стыковки предшествует дальнее сближение, затем ближнее, затем с причаливания начинается собственно стыковка. Специальные выступающие элементы стыковочных агрегатов входят в механическое зацепление, после чего начинается стягивание объектов, по окончании которого происходит сцепка замков. В этот момент электро- и гидроразъёмы уже соединены. Далее производится проверка герметичности стыка, после чего можно открыть люки и переходить из объекта в объект.
При стыковке объектов большой массы (более массы транспортного корабля класса «Союз» или «Прогресс» — около 7 тонн) стык дополнительно усиливается изнутри съёмными стяжками.
Если объект будет находиться в состыкованном состоянии достаточно долго, возможен частичный демонтаж стыковочных механизмов и замена их на компактные плоские люки.
Стыковочный агрегат
 Стыковка КА Союз и Аполлон с универсальными (андрогинными) стыковочными модулями (рисунок)
Стыковка КА Союз и Аполлон с универсальными (андрогинными) стыковочными модулями (рисунок)Стыковочные агрегаты делятся на два больших класса — активно-пассивные и универсальные.
Активно-пассивные стыковочные агрегаты (чаще всего типа « штырь-конус») различаются по конструкции и устройству на двух стыкующихся космических аппаратах. При этом активный корабль не может состыковаться с другим активным, а пассивный — с другим пассивным.
Универсальные стыковочные агрегаты (обычно андрогинно-периферийные) этого недостатка лишены.
Однако, существующие системы с универсальными стыковочными агрегатами (например, АПАС-75, созданный по программе «Союз-Аполлон», и АПАС-89, предполагавшийся для «Бурана», АПАС-95, использовавшийся на станции «Мир», а также использовавшийся на Международной космической станции для челноков Шаттл и модулей) уступают по массогабаритным параметрам и требованиям к точности наведения КА более распространённым штырь-конусным системам.
Впервые активно-пассивные стыковочные агрегаты появились на американских КА «Джемини», и предназначались для стыковки с ракетной ступенью «Аджена» с целью отработки процессов сближения и стыковки по программе подготовки к программе «Аполлон».
Ранние активно-пассивные стыковочные агрегаты, установленные на кораблях «Джемини» и кораблях «Союз» с номерами 1, 2 (беспилотный корабль), 3, 4, 5, 7, 8, не имели люка для внутреннего перехода, и космонавтам приходилось выходить в открытый космос в скафандрах. Такая же схема была предусмотрена и в лунно-орбитальном 7К-ЛОК и лунно-посадочном ЛК кораблях-модулях комплекса Л3 советской лунной экспедиции ради экономии массы стыковочного агрегата.
В американской лунной программе «Аполлон» лунно-орбитальный и лунно-посадочный корабли-модули комплекса использовали усовершенствованный стыковочный узел с внутренним переходом.
В СССР стыковочные агрегаты начали разрабатываться по программе 7К-9К-11К, целью которой был пилотируемый облёт Луны без использования тяжёлой ракеты-носителя. Несмотря на то, что программа была отменена, космический корабль «Союз», выросший из проекта 7К, был оснащён активно-пассивным стыковочным агрегатом и системой поиска, сближения и стыковки «Игла», позволившей осуществить первую автоматическую стыковку беспилотных аппаратов. Далее стыковочные агрегаты гражданских («Салют-ДОС», «Мир») и военных («Алмаз-ОПС») орбитальных станций и пилотируемых («Союз») и грузовых («Прогресс» и ТКС) кораблей и модулей к ним были унифицированными и использовали внутренний переход.
Китай освоил технологию андрогинно-периферийный стыковки (автоматической и ручной) для реализации программы национальных космических станций «Тяньгун», посещаемых кораблями «Шэньчжоу» к 2011 г.
Стыковка — WiKi
Стыковка — процесс (или способ) соединения космических аппаратов (КА) с помощью стыковочного механизма (агрегата стыковки), допускающего в дальнейшем рассоединение (расстыковку) КА и продолжение их полётов по отдельности. При этом осуществляется механическое соединение, достаточно прочное для управления полётом одного аппарата с помощью состыкованного с ним другого. Стыковочный механизм может соединять (и не соединять) электрические схемы и гидравлические системы аппаратов; он может также содержать люк для перехода космонавтов из аппарата в аппарат.
Создание технологии
Проблема стыковки встала перед создателями космических аппаратов вплотную в частности в связи с программой осуществления пилотируемых облётов Луны и высадок на Луну. Первые технически реализуемые предложения по стыковке относятся к 1962 году.
Одной из ступеней к созданию самой технологии стыковки стал Первый групповой полет пилотируемых кораблей который состоялся 12 августа 1962 года с участием корабля «Восток-3» и корабля «Восток-4» выведеным на орбиту спустя сутки[1]. Максимальное сближение кораблей составило порядка 6,5 км.
Стыковка в частности позволяла осуществить полёт пилотируемых экспедиций на Луну — достигалась существенная экономия массы лунного корабля за счёт того, что на Луну садился и с Луны взлетал не весь корабль, а только специальный максимально облегчённый и неспособный к посадке на Землю лунный посадочный модуль корабля. Лунный посадочный и орбитальный модули корабля использовали стыковку в реализованной американской программе «Аполлон» и в неосуществлённой советской программе Л3. Также готовился к полётам вариант корабля «Союз-Контакт» для отработки системы стыковки «Контакт» модулей 7К-ЛОК и ЛК советского комплекса Л3, но в связи с недоведением программы лунного посадочного модуля Л3 до стадии пилотируемых полётов, необходимость полётов «Союза-Контакта» отпала.
Первое в мире сближение двух пилотируемых кораблей было произведено 15 декабря 1965 года кораблями США «Джемини-7» и «Джемини-6A». Максимальное сближение кораблей составило порядка 30 сантиметров.
Первая в мире стыковка в ручном режиме была осуществлена 16 марта 1966 года пилотируемым кораблём США «Джемини-8» с ракетной ступенью «Аджена» запущенной 100 минутами ранее.
В апреле 1967 года должна была состоятся первая в мире стыковка двух пилотируемых кораблей корабля «Союз-2А» с кораблем «Союз-1», но в связи с неполадками в полете «Союз-1» запуск второго корабля был отменен.
Первая в мире полностью автоматическая стыковка двух космических аппаратов произведена 30 октября 1967 года беспилотными вариантами кораблей «Союз» «Космос-186» с «Космос-188».
Первая в мире стыковка двух пилотируемых кораблей была осуществлена 16 января 1969 года кораблем «Союз-4» с «Союз-5». Переход экипажа из одного корабля в другой осуществлялся путем выхода в открытый космос.[2]
Первая в мире стыковка двух пилотируемых кораблей с переходом экипажа через стыковочный узел была осуществлена в марте 1969 года во время полета «Аполлон-10» на лунной орбите.
Первая в мире стыковка двух пилотируемых кораблей при высадке Луну была осуществлена в июле 1969 года во время полета «Аполлон-11».
Первая в мире стыковка пилотируемого корабля с космической станцией и переходом экипажа была осуществлена 7 июня 1971 года кораблем «Союз-11» со станцией «Салют-1».
Первая в мире стыковка двух пилотируемых кораблей разных государств была осуществлена в июле 1975 года кораблем США «Аполлон» с кораблем СССР «Союзом-19» в рамках проекта «Союз — Аполлон».
Стыковки очень широко использовались в лунной программе «Аполлон», для создания и снабжения орбитальных станций, как в СССР/России («Салют-ДОС», «Алмаз-ОПС», «Мир»), так и в США («Скайлэб», полеты к станции «Мир»), Китая («Тяньгун-1», «Тяньгун-2») а в настоящее время — Международной космической станции.
Процесс
Процессу стыковки предшествует дальнее сближение, затем ближнее, затем с причаливания начинается собственно стыковка. Специальные выступающие элементы стыковочных агрегатов входят в механическое зацепление, после чего начинается стягивание объектов, по окончании которого происходит сцепка замков. В этот момент электро- и гидроразъёмы уже соединены. Далее проверяется герметичность стыка, после чего можно открыть люки и переходить из объекта в объект.
При стыковке объектов большой массы (более массы транспортного корабля класса «Союз» или «Прогресс», близкой к 7 тоннам) стык дополнительно усиливается изнутри съёмными стяжками.
Если получившийся составной объект будет находиться в состыкованном состоянии достаточно долго, то возможен частичный демонтаж стыковочных механизмов и замена их на компактные плоские люки.
Стыковочный агрегат
Стыковка КА Союз и Аполлон с универсальными (андрогинными) стыковочными модулями (рисунок)Стыковочные агрегаты делятся на два больших класса — активно-пассивные и универсальные.
Активно-пассивные стыковочные агрегаты (чаще всего типа «штырь-конус») различаются по конструкции и устройству на двух стыкующихся космических аппаратах. При этом активный корабль не может состыковаться с другим активным, а пассивный — с другим пассивным.[3][4] Примером является российская Система стыковки и внутреннего перехода.
Универсальные стыковочные агрегаты (обычно андрогинно-периферийные) этого недостатка лишены.
Однако, существующие системы с универсальными стыковочными агрегатами (например, АПАС-75, созданный по программе «Союз — Аполлон», и АПАС-89, предполагавшийся для «Бурана», АПАС-95, использовавшийся на станции «Мир», а также использовавшийся на МКС для челноков Шаттл и модулей) уступают по массогабаритным параметрам и требованиям к точности наведения КА более распространённым штырь-конусным системам.
Впервые активно-пассивные стыковочные агрегаты появились на американских КА «Джемини», и предназначались для стыковки с ракетной ступенью «Аджена» с целью отработки процессов сближения и стыковки в рамках программы подготовки к программе «Аполлон».
Ранние активно-пассивные стыковочные агрегаты, установленные на кораблях «Джемини» и кораблях «Союз» с номерами 1, 2 (беспилотный корабль), 3, 4, 5, 7, 8, не имели люка для внутреннего перехода, и космонавтам приходилось выходить в открытый космос в скафандрах. Такая же схема была предусмотрена и в лунном орбитальном 7К-ЛОК и лунном посадочном ЛК модулях корабля-комплекса Л3 советской лунной экспедиции ради экономии массы стыковочного агрегата.
В американской лунной программе «Аполлон» лунные орбитальный и посадочный корабельные модули использовали усовершенствованный стыковочный узел с внутренним переходом.
В СССР стыковочные агрегаты начали разрабатываться по программе 7К-9К-11К, целью которой был пилотируемый облёт Луны без использования тяжёлой ракеты-носителя. Несмотря на то, что программа была отменена, космический корабль «Союз», выросший из проекта 7К, был оснащён активно-пассивным стыковочным агрегатом и системой поиска, сближения и стыковки «Игла», позволившей осуществить первую автоматическую стыковку беспилотных аппаратов. Далее стыковочные агрегаты гражданских («Салют-ДОС», «Мир») и военных («Алмаз-ОПС») орбитальных станций и пилотируемых («Союз») и грузовых («Прогресс» и ТКС) кораблей и модулей к ним были унифицированными и использовали внутренний переход.
Китай освоил технологию андрогинно-периферийный стыковки (автоматической и ручной) для реализации программы национальных космических станций «Тяньгун», посещаемых кораблями «Шэньчжоу» с 2012 года.[5]
Список стыковочных систем
Стыковочный узел «Прогресса-М»- Андрогинно-периферийный агрегат стыковки: АПАС-75, АПАС-89, АПАС-95. На российских модулях МКС используют систему «штырь-конус» — стыковочные агрегаты системы стыковки и внутреннего перехода (ССВП) для стыковки кораблей «Союз» и «Прогресс» и гибридные стыковочные агрегаты ССВП-М для стыковки модулей, причем ССВП-М имеет стыковочный шпангоут такой же, как у АПАС-95.
- В октябре 2010 года согласован Международный стандарт стыковочной системы (англ. International Docking System Standard, сокр. IDSS)[6][7], в котором используются основные элементы АПАС-95 и LIDS, но они несовместимы.
- Система стыковки НАСА разработана по этому стандарту, другое её название это Стыковочная система слабого столкновения (англ. Low Impact Docking System, сокр. LIDS), разработанная НАСА, которую предполагалось использовать в проекте «Созвездие». Несмотря на то, что эта система является уменьшенной, облегчённой и упрощённой версией АПАС, они несовместимы. Для сопряжения узлов системы АПАС-95 с Системой стыковки НАСА разработан Международный стыковочный адаптер (англ. International Docking Adapter, сокр. IDA).
- Также для стыковки на МКС используется Единый механизм пристыковки англ. Common Berthing Mechanism или (CBM) — эта система используется на H-II Transfer Vehicle, Dragon SpaceX, Cygnus.